














Unitree Z1
Couldn't load pickup availability
On order
On order













Unitree Z1 - Compact 6-axis Robotic Arm
High-precision and lightweight manipulation system for mobile platforms and industrial automation.
 Which industrial and research applications is this robot suitable for?
Which industrial and research applications is this robot suitable for?
 Which industrial and research applications is this robot suitable for?
Which industrial and research applications is this robot suitable for?Unitree Z1 is designed for a wide range of tasks where mobility and precision are key. In logistics and warehouses, it enables "pick-and-place" operations on mobile platforms. In industrial production, it serves for the assembly of lightweight components and machine tending. Due to its open architecture, it is indispensable in research institutes for developing manipulation algorithms and in "New Retail" scenarios for automated service and customer interaction.

 Perfect synergy with mobile robots
Perfect synergy with mobile robots
 Perfect synergy with mobile robots
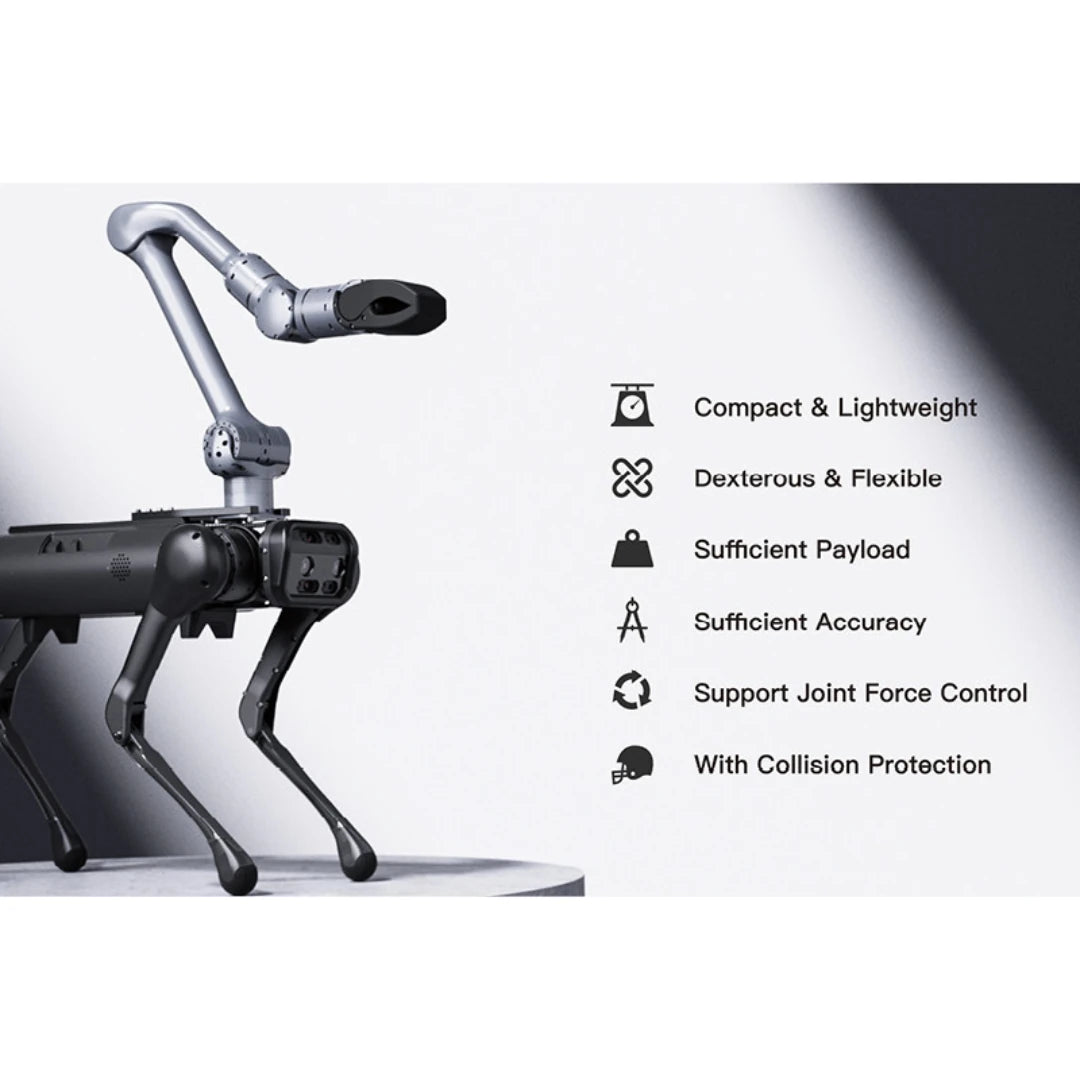
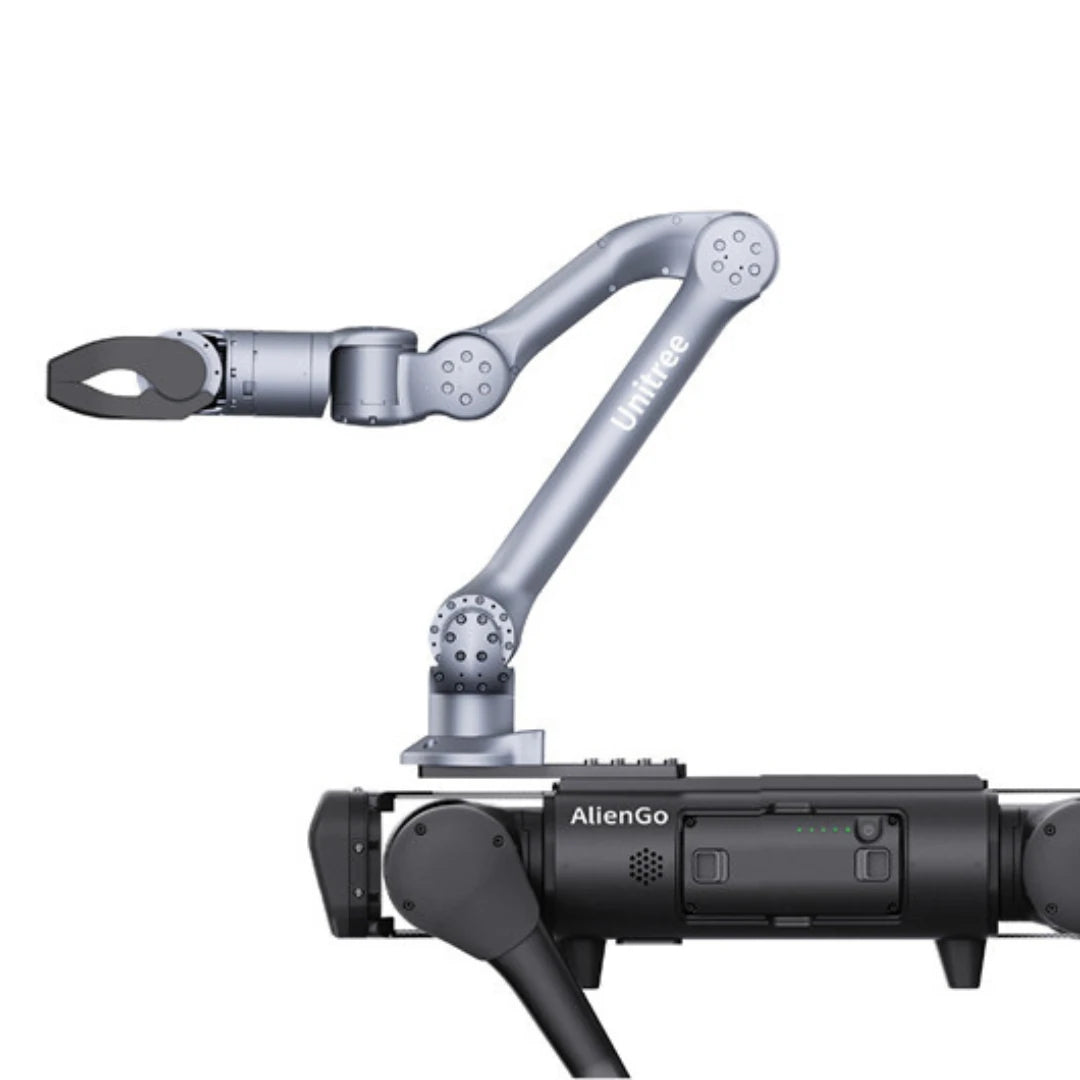
Perfect synergy with mobile robotsThe Z1 is not just a static arm; it was developed specifically for integration onto quadruped robots (such as Unitree Aliengo and B1) and other mobile vehicles (AGV/AMR). With its compact design and standardized interface, it allows mobile robots to not only observe but physically interact with the environment – opening doors, pressing buttons, or carrying cargo on challenging terrain.
 6 degrees of freedom and harmonic drives
6 degrees of freedom and harmonic drives
 6 degrees of freedom and harmonic drives
6 degrees of freedom and harmonic drivesThe robotic arm boasts 6 degrees of freedom (6 DOF), allowing it exceptional flexibility and reach from various angles. Each joint uses high-precision harmonic reducers and industrial cross-roller bearings. This ensures smooth movement, high torque (up to 33 N·m at the base), and minimal backlash (~6 arcmin), which is crucial for precise operations.

 Safety and collision detection
Safety and collision detection
 Safety and collision detection
Safety and collision detectionFor safe collaboration between humans and robots (collaborative work), the Z1 is equipped with a collision detection system. Advanced algorithms and torque feedback allow the arm to stop immediately or adjust force in case of unexpected contact. Support for "Joint Force Control" ensures force control precision up to ~0.2 N·m, protecting both the robot and its surroundings.
 Weight-to-payload ratio
Weight-to-payload ratio
 Weight-to-payload ratio
Weight-to-payload ratioUnitree Z1 stands out for its lightweight construction. The arm itself weighs only about 4.3 kg (depending on the version), yet it provides an impressive payload capacity. The Z1 Air version lifts up to 2 kg, while the more powerful Z1 Pro version handles loads up to 3 kg (even more under certain conditions). This favorable ratio is ideal for mounting on smaller mobile platforms where every kilogram matters.

 Speed and movement dynamics
Speed and movement dynamics
 Speed and movement dynamics
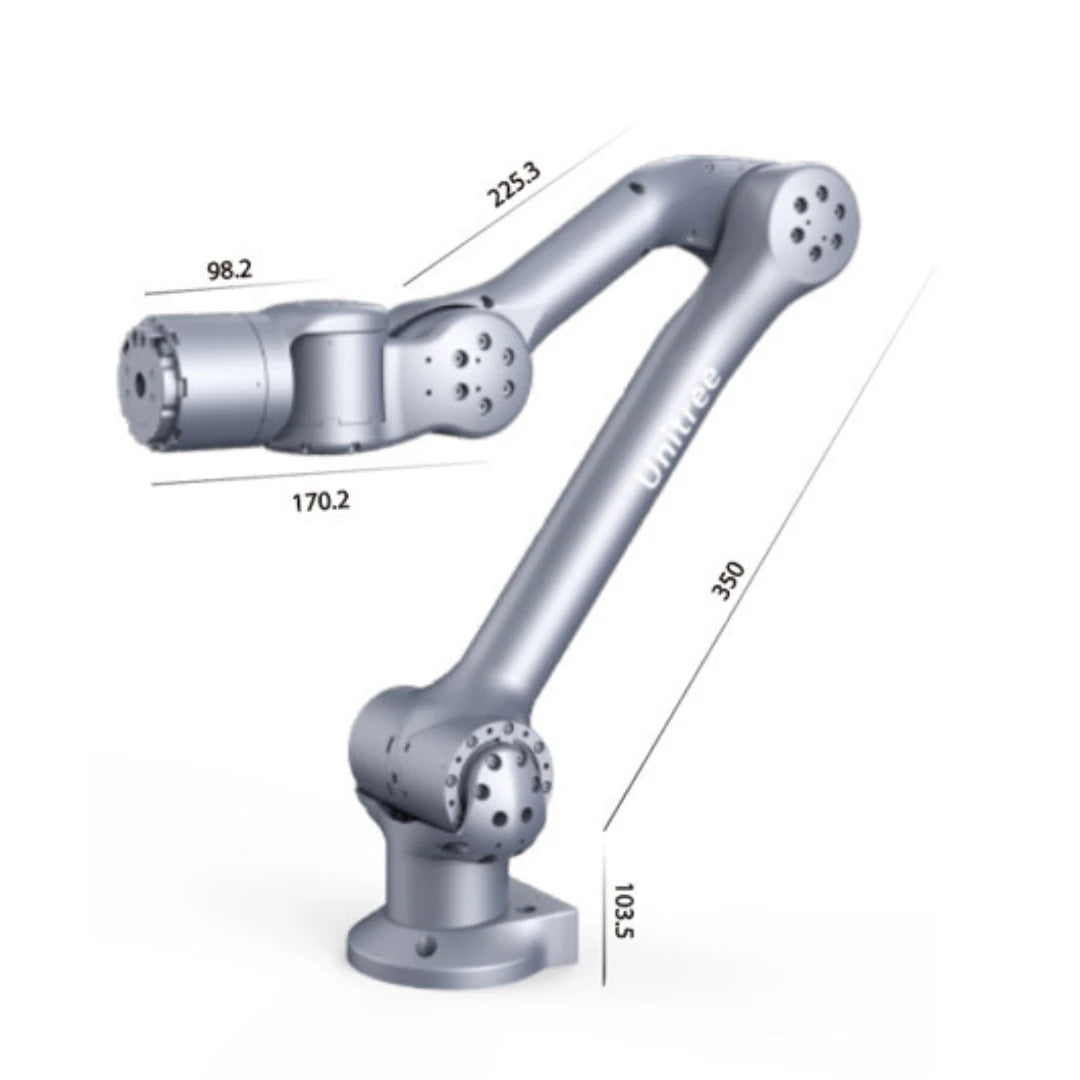
Speed and movement dynamicsDespite its compact size, the Z1 is an extremely agile device. The maximum joint rotation speed reaches up to 180°/s, enabling fast cycle times in production processes. The arm can perform complex movements within its working range (740 mm reach) with high repeatability (~0.1 mm), ensuring consistency in repetitive tasks.

 Open source development and API
Open source development and API
 Open source development and API
Open source development and APIUnitree Z1 is a true platform for developers ("Open Programming Interface"). It supports programming in C++ and is fully compatible with ROS (Robot Operating System). Users have access to low-level and high-level commands, including torque, position, and speed control for each individual joint, enabling the development of custom kinematics and control solutions.

 Connectivity and tool changing
Connectivity and tool changing
 Connectivity and tool changing
Connectivity and tool changingThe end of the arm (flange) allows for quick changes of various effectors – from electric grippers and suction cups to screwdrivers and cameras. The arm communicates via a reliable Ethernet interface and uses RS485 for internal communication. It is powered by a standard 24V source, facilitating integration into existing industrial systems.
 Package contents and support
Package contents and support
 Package contents and support
Package contents and support- Unitree Z1 Robotic Arm (Air or Pro version)
- Power and communication cables
- Mounting accessories for mobile platforms
- Documentation and SDK access
- Warranty: 1 year (extension option for business users)
- Service and technical support at the location: Tržaška cesta 222, 1000 Ljubljana.
 Technical specifications
Technical specifications
 Technical specifications
Technical specifications| Model | Unitree Z1 (Air / Pro) |
| Degrees of Freedom (DOF) | 6 axes |
| Arm weight | 4.1 kg (Air) / 4.3 kg (Pro) |
| Payload | 2 kg (Air) / ≥3 kg (Pro) |
| Maximum reach | 740 mm |
| Repeatability | ~0.1 mm |
| Power supply | 24V DC, current >20A (Max. power 500W) |
| Communication interface | Ethernet (UDP) |
| Internal bus | RS485 |
| Operating system | Ubuntu (ROS support) |
| Control modes | Position control, Force Control |
| Force control precision | ~0.2 N·m |
| Maximum joint speed | 180°/s (all joints) |
| J1 movement range | ±150° |
| J2 movement range | 0 to 180° |
| J3 movement range | -165° to 0° |
| J4 movement range | ±80° |
| J5 movement range | ±85° |
| J6 movement range | ±160° |
| Reducers | Harmonic reducers (ratio 60+) |
| Housing material | Aluminum alloy, composites |
| IP protection | IP54 (basic protection against dust and splashing) |
Unitree Robotics
When technology comes to life.
Company History
Key milestones
Present
Similar products
-


Unitree AlienGo
Only 2 leftRegular price 65.399,90 €Sale price 65.399,90 € Regular priceUnit price € per€ -


Unitree B2
Only 2 leftRegular price 128.999,90 €Sale price 128.999,90 € Regular priceUnit price € per€ -


Unitree G1
Only 2 leftRegular price 21.139,90 €Sale price 21.139,90 € Regular priceUnit price € per€ -


Unitree GO2 Air/Pro
Only 4 leftRegular price From 2.349,90 €Sale price From 2.349,90 € Regular priceUnit price € per€ -


Unitree H1
Only 2 leftRegular price 115.599,90 €Sale price 115.599,90 € Regular priceUnit price € per€ -


Unitree Z1
Only 2 leftRegular price 21.999,90 €Sale price 21.999,90 € Regular priceUnit price € per€












FAQ
Learn about the frequently asked questions regarding Unitree robots.
Which robot model is most suitable for industrial inspections and work on challenging terrain?
Do the robots support the integration of custom sensors and software (SDK/API)?
How are service, spare parts, and technical support handled in Slovenia?
Can robots operate in the rain and dusty industrial plants?
What are the manipulation options and is it possible to install a robotic arm on the robot?
What is the battery life and is continuous use (24/7) possible?
Do you offer consultation and product demonstrations before purchase?
What payment methods do you accept?
Where do you deliver?
What are the delivery costs?
What is the return policy?

Blog posts
-

Ultimate guide to choosing an ECONO e-bike (2026 Series): Analysis of all models
Choosing the right electric bike is often complicated due to...6 min read -

Step-by-step to the E-bike subsidy in 2026
In this article, we explain who is eligible for the...5 min read -

Electric scooters are safe if we know how to use them: how to properly maintain the battery and why buying cheap from abroad does not pay off
In this article, we reveal how to take care of...6 min read -

Riding electric scooters and mopeds from now on only for those over 15 years old
Slovenian legislation in the field of micro-mobility has undergone a...4 min read -

Unitree Robots: The Future of AI at EVOLT
We are proud to announce that eVolt has become the...4 min read -

Free trial of the VIGX ANT-H1 PRO exoskeleton in Ljubljana
If you are experiencing walking difficulties, we invite you for...2 min read -

EVOLT & KALUU: A New Era of Smart Infrastructure in Slovenia
EVOLT announces an exclusive partnership with KIG d.d. Discover KALUU...3 min read -

Langfeite 2026 Pre-orders: 5% discount & free delivery
With the year 2026, a new history of Slovenian micromobility...3 min read






